Today, we are going to discuss the "Calculation method and concept of gripping force for lathe chuck pressureA note on "The
特にデリケートな材料を旋盤加工する際、チャック圧の想定は重要だと思っています。 以前、ある製品の旋盤加工で「把握力の計算」が必要な事があって、その際に知った内容になります。

旋盤のチャック・把持力の計算
計算の前に基本事項メモ
把持力の計算の前に、旋盤のチャックに関するJISから、チャックに使われるジョー(爪)の基本的な内容からメモしていきます。
- JIS名:三つ爪スクロールチャック(チャック)
- JIS番号:JIS B 6151
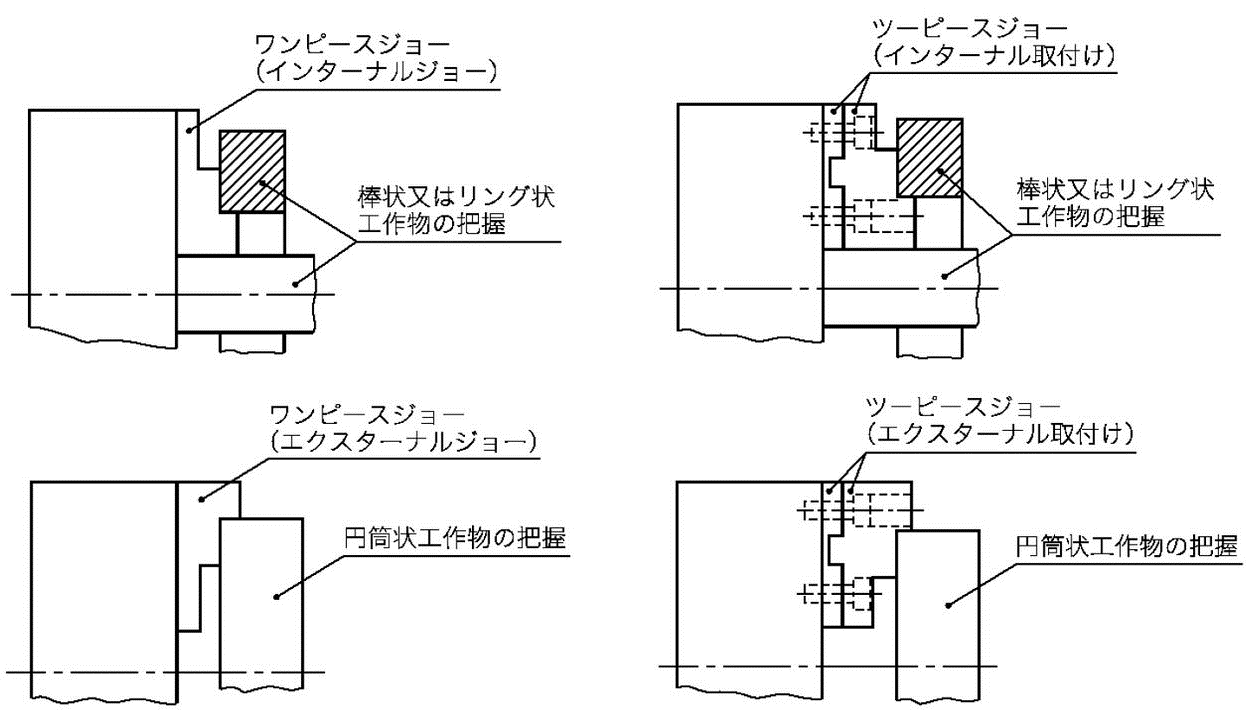
一般的に使われる爪(ジョー)の名称
マスタジョーとは
工作物を直接把握する爪を取り付ける台
トップジョーとは
マスタジョーに取り付けて工作物を直接把握する爪
ワンピースジョーとは
マスタジョーとトップジョーを一体成形した爪
ツーピースジョーとは
マスタジョーとトップジョーからなる爪
JISではジョーの硬さが規定されている
ジョーの工作物をつかむ部分の硬さは「55HRC以上」となっている
チャックの仕様に記載されている用語とその意味
では次に、チャックの仕様書に記載されている用語をメモします。
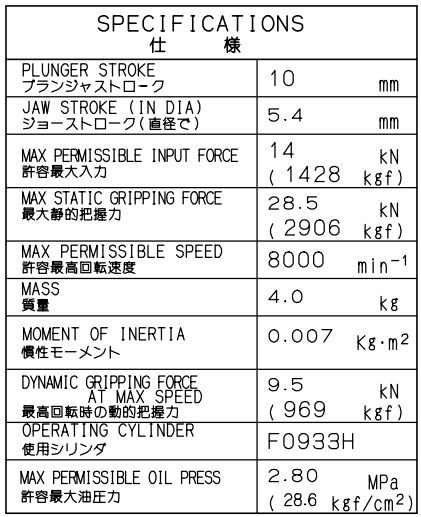
画像:パワーチャックB-204(北川鉄工所)お借りしました
プランジャストロークとは
チャックには3つの爪があり、その爪を動かすためにチャック内部では心棒が前後に動くストローク量
ジョーストロークとは
チャックについている爪(ジョー)の直径でのストローク量
例えばジョーストロークが5mmであれば直径25mmの中空が20mmまで狭くなるということ。また、爪のストロークは、チャック内部のカムレバー比の違い(型式違い)により変化する
許容最大入力とは
チャックの設計上許される最大のハンドルトルク
最大静的把握力とは
チャックが回転していないときに得られる最大の把握力。
- ここで規定される把握力とは、チャック3つの爪が工作物に与える「半径方向の力」の総和
- 最大静的把握力はJISの「呼び経区分」で最大静的把握力の下限値が決められているが製造メーカーの指定による

許容最高回転速度とは
指定の爪を使用し、重量・重心位置を規定した場合における最高使用回転速度で、主に実測値をメーカーが指定している
※JISで定められている「許容最高回転速度」の2つの条件
- 最大静的把握力で締付けた時、許容最高回転速度における理論動的把握力は最大静的把握力の1/3以上
- ジョーはエクスターナルジョー又はエクスターナル取付とし、外周端をチャックボデー外周に一致させた状態で計算
慣性モーメントとは
慣性モーメントについては別途記事がありますのでそちらをご確認ください。
Reference:How to calculate the moment of inertia (inertia) of a rotating body and calculation excel
最高回転時の動的把握力とは
チャック最高回転時の把握力であり、有効把握力とも呼ばれる。
チャックの理論動的把握力の計算式
では、ここからチャックの把持力の計算に移っていきます。 理論的な把持力の計算式は以下の通りです。
では、この動的把持力はどのように変化するか、下記に纏めます。
動的把握力の傾向(重要)
- 外径チャック時は回転速度の増大と共にワーク把握力が減少する
- 外径チャック時はジョーの質量が大きいと回転時に把握力が減少する
- 外径チャック時はジョーの質量が小さいと回転時に把握力の減少を比較的抑えることが出来る
- 内経チャック時は回転速度の増大と共にワーク把握力が増加する
- 内径チャック時はジョーの質量が大きいと回転時に把握力が増加する
- 内径チャック時はジョーの質量が小さいと回転時に把握力の増加を比較的抑えることが出来る
結果、ジョーの質量は把握力を大きく増減させないために、基本的に軽いほうが良いということになりますね。(そんなに選べるものでもないと思いますが・・) シビアな加工をする場合は考慮してみてください。
チャックの動的把持力計算に使える遠心力の参考計算
では、動的把持力を計算するときに必要な遠心力の計算を参考としてメモしておきます。 先ほどの 理論動的把持力の計算では、これから計算する遠心力を静的把持力から引くことで求められる The first two are the following.
計算条件は以下の通りです。
- ジョーの回転中心直径:0.15m
- ジョーの回転中心半径:0.075m
- マスタージョーとトップジョーの1セット質量:1.2kg
- 爪のセット数:3個
- 回転数:8000rpm
- 円周方向の速度:62.8m/s(8000/60*0.15π<パイ>)
- 遠心力係数:0.8
遠心力を求める
遠心力N=質量kg*(円周方向の速度^2/半径)= 1.2×(62.8^2/0.075)= 63101.4N
爪が3個あるので・・・・
遠心力合計=63101.4*3=189303N
しかし実際はロスが発生するので・・・
ロスを加味した遠心力=189303*0.8=151442.4N
チャックでよく使われる単位に変換すると 遠心力(kN)=151442.4N/1000=151.4424kN となります。
supplement
遠心力は計算中に「質量kg」で計算するのにN(ニュートン)表示になる理由は「kg·m/s^2=N」によるものです。
That's it.