今天铰接式机器人运动、干扰和战术模拟的必要性和方法。关于"...... "的说明
关节型机器人可以在狭小的空间内自由移动,并能避开障碍物,但它们可能会用肘部朝计划外的方向移动,因此如果只看目录中的运动范围,可能会犯错误。 另外,有些人会给机器人安排各种工作,这可能会降低战术时间的速度,因此一定要仔细考虑。
这篇文章介绍了机器内部的关节型机器人,以及如何进行核查,应采取哪些预防措施? 注释
铰接式机器人的运动、干扰和触觉。
我们机械设计师倾向于认为,机器人可以同时完成所有动作、同样重要的是,要知道如何简化机器人的行为。我认为这将是一个好主意。使用关节型机器人在狭小空间避开障碍物时可能出现的机械问题有
- 在回避动作中将肘部击打到不同位置(干扰)。
- 回避动作比预期多(时间损失)。
这种情况时有发生,不是吗?虽然如果只看设计模型,操作似乎足够可行,但不要这样认为,而要模拟机器人的操作、干扰和策略(在机器人制造商处)。
检查操作、干扰和触觉的方法
您可以与计划使用的机器人制造商进行模拟。
要做好哪些准备。
- 机器人的每个动作(制造商指定的数据)
- 了解机器人的操作顺序。
- 附近的干扰区域(制造商指定的数据)。
我以前模拟过的制造商有起初,我给他们发送了一份显示其工作原理的 pdf 文档,但他们说三维数据会更好,所以我要求他们用中间三维文件(iges)进行模拟。周围的设备也同时被派去检查干扰区域。
模拟结果的启示
模拟结果显示
- 手术是否有任何压力?
- 预计的运营策略。
是
在哪里?除了机器人的触控时间外,卡盘和其他辅助设备的操作完成时间以及前后传输时间也会影响整体触控时间。因此,作为机械设计师,我们要做的就是将模拟结果作为以下工作的基础微调机器人的移动位置,使其能够比预期移动得更稳定、更快速。对
更仔细地检查机器人的运行情况,尤其是当机器人需要执行大量动作时。
摘要和补充信息
这次,我记录了如何验证多轴机器人的操作,并收到了 Twitter 上"@baikeido "的评论。
引自评论。
6 轴机器人成功的捷径是事先通过模拟对其进行深入研究。是的!如果是七轴机器人,粗略考虑一下就可以了。(不过,机器人价格昂贵)。
现实有了六轴,如果安装姿势或其他方面出现干扰,你就无能为力了。所以--在机械方面很难做任何事情。
不过,这次我面对的是一个 6 轴关节机器人、我知道,在处理六轴问题时,模拟更为必要。。对于 7 轴,似乎需要进行不同的模拟。我在处理 7 轴问题时也会留下记录。
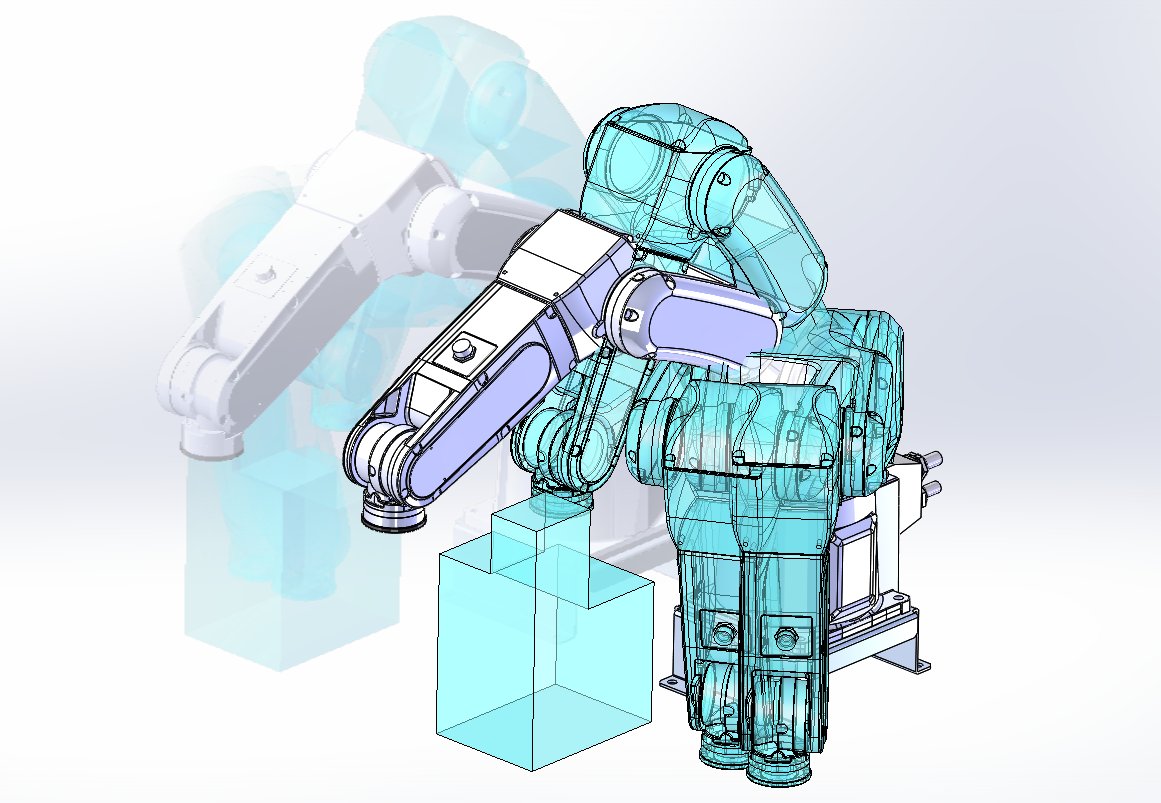
上图