今日は「多関節ロボットの動作・干渉・タクトシミュレーションの必要性と方法」についてのメモです。
多関節ロボットは狭い場所で自在に動けるから障害物も避ける事が出来ますが、予定外に肘打ちしちゃう場合もあるのでカタログの可動範囲だけ見ていると失敗します。 また、ロボットに色々な仕事をさせちゃう人も居て、速い予定がタクト遅らせちゃうパターンもあるので検討をしっかりしましょう。
この記事では、機械内部に多関節ロボットをレイアウトし 検証はどのようにすれば良いか・注意点は何か についてのメモしています。
多関節ロボットの動作・干渉・タクト
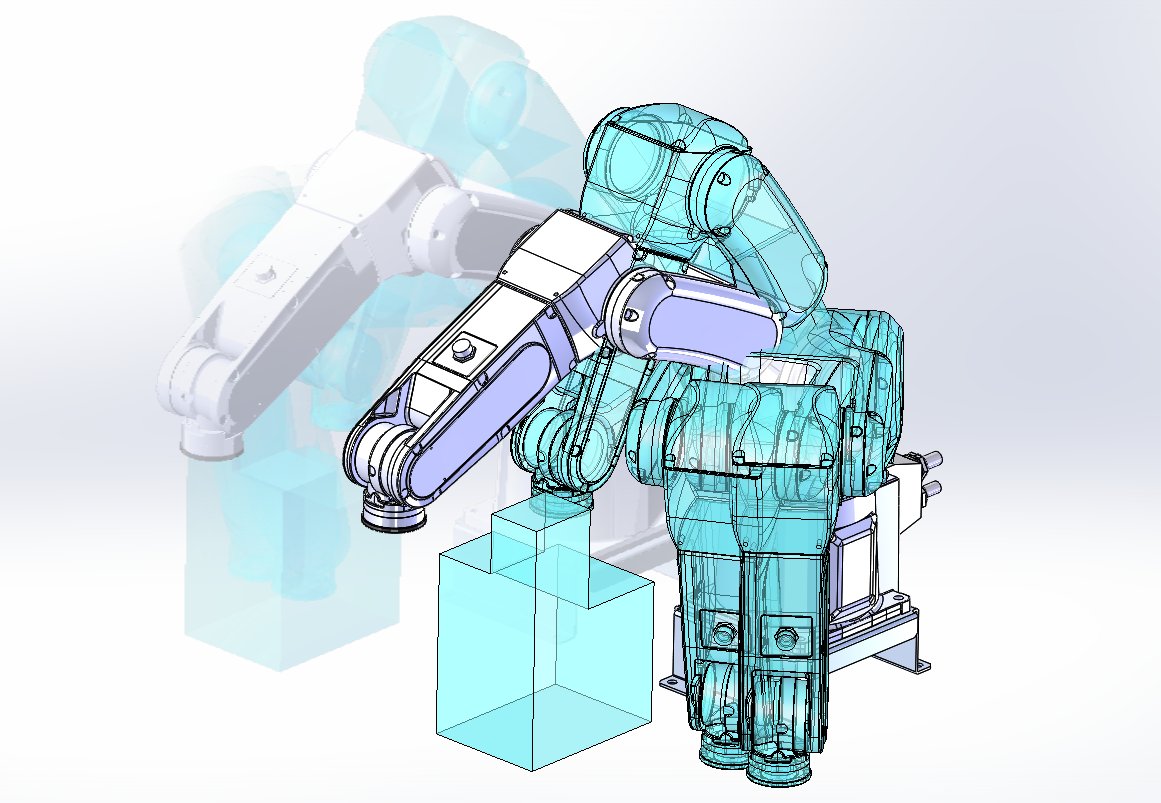
我々メカ設計者は、ロボットはあらゆる動作が同時で行えると信じたい気持ちはありますが、ロボットでも動作をいかに単純にするかというのも重要になってくるかと思います。多関節ロボットを使い、狭い場所で障害物を避ける際に起こりえるメカ的なトラブルは
- 避ける動作で違う場所に肘打ち(干渉)
- 避ける動作が想定より増えた(タイムロス)
このような事が起きますね。設計のモデルだけを見ていると十分可能な動作に見えますが、そう決めつけずにロボットの動作・干渉・タクトは(ロボットメーカーにて)シミュレーションをしましょう。
動作・干渉・タクトチェックの方法
シミュレーションは、使う予定のロボットメーカーさんで可能だと思います。
準備するものは
- ロボットの各動作(メーカーの指定データ)
- ロボットの動作順序の解るもの
- 周辺の干渉エリア(メーカーの指定データ)
私が以前シミュレーションをしたメーカーは、始めは動作のわかるpdf資料を送ったんですが3Dデータの方が良いそうで、3Dの中間ファイル(iges)でシミュレーションをしてもらいました。周辺の装置も送って同時に干渉域も確認してもらいました。
シミュレーション結果で解ること
シミュレーション結果で解ることは
- 動作に無理はないか
- 予測される動作タクト
です。
ここで重要になるのは、このロボットのタクトに加え、チャックなど付帯する機器・前後搬送の動作完了タイミングなどが合わさって全体のタクトには影響してきますので、私たちメカ設計者がやるべき事は、シミュレーション結果を基にロボットの動作がより安定・想定より速く動けるように動作位置を微調整することですね。
特にロボットに沢山の動作をさせる場合はより念入りに動作確認をしましょう。
まとめと補足
今回は多軸ロボットの動作検証方法をメモしましたが、Twitterで「@baikeido」さんからこんなコメントを頂いています。
引用:コメントより
6軸ロボットはシミュレーションでしっかり事前検討する事が成功の近道ですね!7軸ロボットだったらある程度ラフな検討でも大丈夫だけど。(ただしロボットは高価)
ほんと6軸だと取り置き姿勢とかが干渉してたらどうしようもないですからね〜メカ側でなんとかするしかないのが辛いところ。
今回、私が扱っていたのは6軸の多関節ロボットですが、6軸を扱う場合はシミュレーションがより必要だと理解できました。7軸だとまた違ったシミュレーションが必要そうな感じですね。また、7軸を扱った際にはメモを残そうと思います。
以上です。