今日は「ボールねじを使って水平搬送する時のモータートルク基本計算」のメモです。機械の構成要素として
- LMガイド をスライド機構とし
- モーター+ボールねじ で駆動する
という構成は良く利用しますが、このボールねじを利用した設計は少し手間が掛かります。(掛かりますよね?)
特に少し手間なのがモーターの容量(トルク)計算です。 ここを間違えると大変なので、今日は LMガイド+ボールねじを使った水平搬送におけるモーター必要トルクの計算 をメモしておきます。
ご注意:この記事はモーターを直付け(減速機なし)での計算をメモしています。
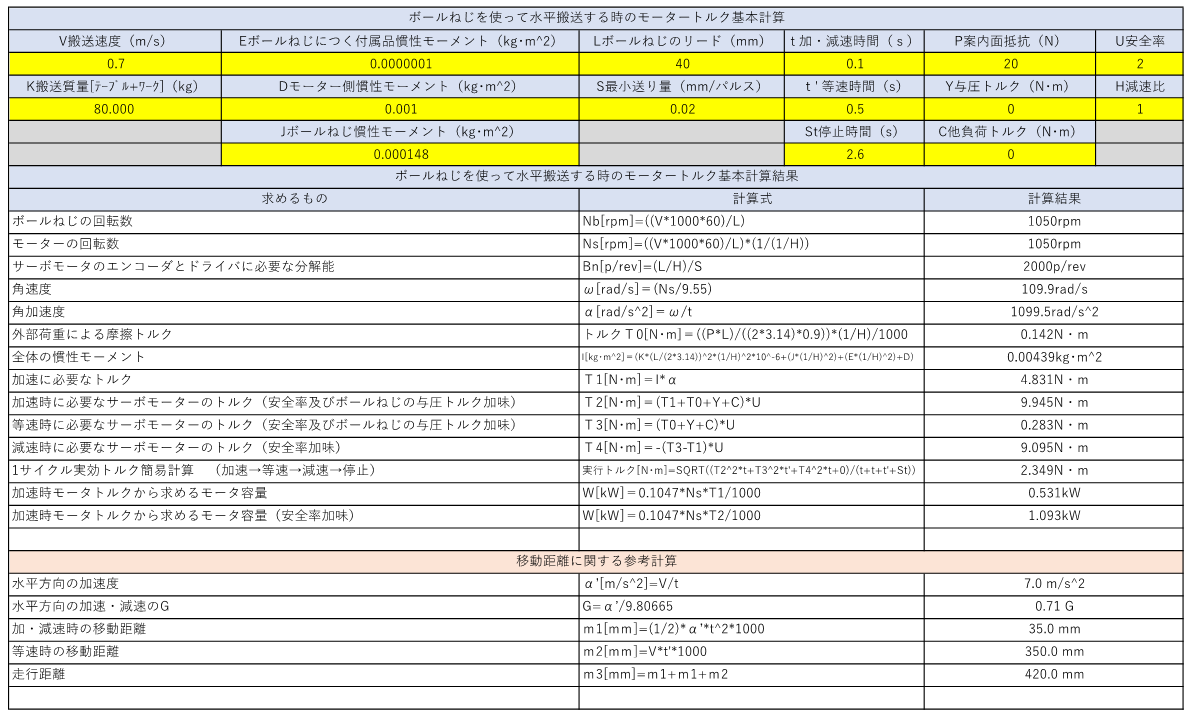
ボールねじを使って水平搬送する時のモータートルク基本計算
モーターのトルク計算をするのに必要な項目
LMガイド+ボールねじを使った水平搬送に必要なモータートルクの計算は以下の項目が必要になります。
- K搬送質量[テーブル+ワーク](kg)
⇒ 手計算・CADにて算出してください
- V搬送速度(m/s)
⇒ 設計の仕様を確認してください
- Eボールねじにつく付属品慣性モーメント(kg・m^2)
⇒ モーターとボールねじを繋ぐカップリングなど
- Jボールねじ慣性モーメント(kg・m^2)
⇒ 詳細に把握するのが難しい場合は こちらの「円柱」 で簡易的に計算してください
- Dモーター側慣性モーメント(kg・m^2)
⇒ モーターカタログで情報を得てください
- Lボールねじのリード(mm)
⇒ 予定しているボールねじのリードが必要です
- t 加・減速時間 [s]
- t' 等速時間 [s]
- St 停止時間 [s]
⇒ 加速や減速はモーターの必要トルクに大きく影響します。
基本的に 加速時間短い=モータートルク大 となります。
駆動速度・時間・移動距離を計算したい方は 運転パターン でご確認ください。
- S 最小送り量(mm/パルス)
⇒ 設計の仕様を確認してください
- Y 与圧トルク(N・m)
⇒ ボールねじに与圧を与えると回転の邪魔をしますので与圧を与える場合は 与圧トルク をご確認ください
- H減速比
⇒ 減速をかける場合に必要です
- C他負荷トルク(N・m)
⇒ その他に負荷となるトルクがあれば入れてください
- P案内面抵抗(N)
⇒ 設計側で想定値を設定してください。 実物がある場合は測定でも良いです。
- U安全率
⇒ 設計で設定・調整してください。
ボールねじの必要回転数
まずボールねじの必要回転数を求めます。 モーターをボールねじに直付けの場合、ここの必要回転数がモーターの回転数に置き換わります。
Nb[rpm]=((V*1000*60)/L)
モーターの必要回転数
モーターの必要回転数を求めます。ここでは減速機を噛ませた場合の計算になります。モーター直付けの場合は「ボールねじの必要回転数=モーターの必要回転数」となります。
Ns[rpm]=((V*1000*60)/L)*(1/(1/H))
サーボモータのエンコーダとドライバに必要な分解能
サーボモーターを利用する場合はドライバに必要な分解能を求めます。これは停止精度が狙ったポイントを得られるか検討するために必要です。
Bn[p/rev]=(L/H)/S
角速度
角速度は以下の計算式で求められます。
ω[rad/s]=(Ns/9.55)
角加速度
角加速度は以下の計算式で求められます。
α[rad/s^2]=ω/t
外部荷重による摩擦トルク
外部荷重による摩擦トルクを求めます。
トルクT0[N・m]=((P*L)/((2*3.14)*0.9))*(1/H)/1000
全体の慣性モーメント
全体の慣性モーメントは以下の計算式で求めることができます。
I[kg・m^2]=(K*(L/(2*3.14))^2*(1/H)^2*10^-6+(J*(1/H)^2)+(E*(1/H)^2)+D)
加速に必要なトルク
加速に必要なトルクは以下の計算式で求めることができます。純粋に加速にだけ必要なトルクです
T1[N・m]=I*α
加速時に必要なサーボモーターのトルク
サーボモーターに必要な加速トルクです。このトルクを、検討しているサーボモーターの瞬間最大トルクが上回る必要があります。
T2[N・m]=(T1+T0+Y+C)*U
等速時に必要なサーボモーターのトルク
等速時に必要なサーボモーターのトルクは以下の計算式で求めることができます。
T3[N・m]=(T0+Y+C)*U
減速時に必要なサーボモーターのトルク
減速時に必要なサーボモーターのトルクは以下の計算式で求めることができます。
T4[N・m]=-(T3-T1)*U
1サイクル実効トルク簡易計算 (加速→等速→減速→停止)
実行トルクは以下の計算式で求めることができます。 検討しているサーボモーターの定格トルクはこの実行トルクより上回っていなければなりません。
実行トルク[N・m]=SQRT((T2^2*t+T3^2*t'+T4^2*t+0)/(t+t+t'+St))
計算エクセルの参考
このような計算書を作ると設計時間の短縮につながります。
エクセルファイルについて
上記の機械のタクト・タイミング・タイムチャート図ですが、今まで多くの方に利用して頂きありがとうございました。 2024年より、このファイルは BASEにてダウンロード販売 となりました。 必要な方はご購入後ご利用ください。
以上です。