今日は 「ヤマハリニアモータ単軸ロボットの特徴メモ」 についてのメモです。
パルスモーターやサーボモーターの電動シリンダはよく取り扱うんですが、リニアアクチュエータの単軸ロボットはあまりなじみがありません。 今日はそのリニアアクチュエータの単軸ロボットを調べるときに気になった項目をメモ・抜粋しておきたいと思います。

カタログよりお借りしました
リニアアクチュエータ単軸ロボット
以下、特徴をメモします。
リニアアクチュエータ開発の経緯
引用:https://www.yamaha-motor.co.jp/robot/lineup/phaser/
長距離を高速搬送が可能。高精度・高推力を誇るリニアモータ使用の単軸ロボット。
製造設備の大型化や工場内の搬送設備の高速化に伴い、ロングストローク、高速、高精度の要求に応えるべく開発されたリニアモータアクチュエータ です。様々な先端ツールを取り付けることで、電気・電子部品や機械部品のネジ締めなどの組立て、挿入、取り出し、搬送、接着剤塗布、ハンダ付けなどのより幅広い用途に使用できます。
ラインナップの範囲
スペックの範囲は以下の通り。
- 最大ストローク:4050mm
- 最高速度:2500mm/s
- 繰り返し位置決め精度:±5μm
- 分解能:1μm
- 最大可搬質量:7 ~160kg
① ここがすごい(と私が思った所)
①-1 危険速度の制約が無い
ボールネジのような危険速度の制約が無い ため特に長距離の搬送でサイクルタイム短縮が図れる。

カタログよりお借りしました
引用:ボールねじの危険速度とは(https://www.kuroda-precision.co.jp/technical-information/bs/bs025.html)
ボールねじのねじ軸のような丸棒形状のものには、曲がりによるたわみ、自重によるたわみが必ずあります。 このような 丸棒形状を持ったねじ軸の両端をベアリングで支持して回転させ、回転速度を上げていくとたわみが大きくなって、ついには回転軸が破損することがあります。
回転軸を破損させるような危険な状態になる回転速度のことを「危険速度(critical speeds)」といいます。
①-2 ダブルキャリア仕様に標準対応がすごい
ひとつのロボット上に二つのキャリアを動作させるダブルキャリア仕様に標準対応。 省スペース、コストダウン、タクトアップが可能。 ※ひとつのロボット上に 3 つ以上のキャリアを動作させる「マルチキャリア」にも対応可能
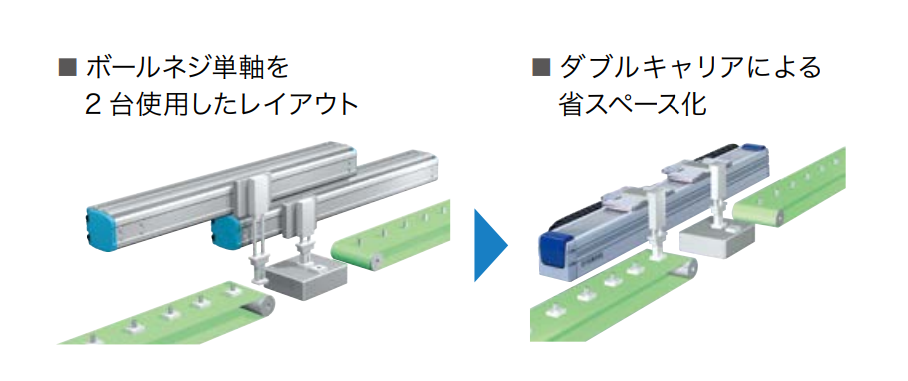
カタログより画像をお借りしました
①-3 コストが低い(らしい)販売店に要確認
主要部品内製化のため低コストで、ボールネジ仕様のアクチュエータと同列で選択できるほどコストも低い。 ※実際今回調べている理由が 今のリニアアクチュエータならコストが安く摩耗を抑えた長期運転が可能ではないか?という提案から でした。
①-4 使用環境も優位
磁気式なので、グリスや切削液が多少かかるような環境でも動作可能
また、防塵構造が良く 高い疲労強度を持つステンレス鋼シャッターを採用。外部からの異物の進入を防止。
①-5 設計者には嬉しいケーブルベアが飛び出ないフラットタイプが標準である
その為、大きな治具の取付けや上物の設計も比較的楽に済む。
①-7 2軸を同期駆動させるデュアルドライブ(IAIでいうガントリ使用)が可能
同期が可能なので、トルクサポート制御、両軸位置決め制御など、ロボットの連結剛性に応じた最適な制御方式をご提案もらえるそう。
①-8 ケーブルベアがオプションで有る
- S:φ8屈曲ケーブル*1、φ4エアチューブ*1(目安の内容量)
- M:φ8屈曲ケーブル*2、φ6エアチューブ*2(目安の内容量)
- L:φ8屈曲ケーブル*2、φ6エアチューブ*3(目安の内容量)
の3タイプが選択可能。
①-7 静寂性を持ち長寿命
ボールネジタイプと違い、摺動部や回転部分が少ないので 静か で アクチュエータは非接触のため磨耗することがなく、長期間にわたって使用するこ
とが可能。
② 使用時に注意(意識)しておきたい事
②-1:完全アブソデックスではない セミアブソ を持っている
電源投入後、運転前に リニアスケールに記録された信号を読み取ることで現在位置を取得、大きく原点復帰させる必要がないが 多少動作する必要があるようです。(最大 76mm 程度、型式による)
②-2 壁掛けでの使用は型式別で制限有り
壁掛け可能なタイプと可能でないタイプがある
②-3 単独の垂直使用はNG
垂直仕様(ブレーキ付)はラインナップに無い。 別途落下防止を設けたうえでの垂直利用が出来るかどうかはメーカーに要確認
最後に
また追記するべき内容があれば追記していきます。
以上です。