今日は「ロボシリンダと単軸ロボットの違い」についてのメモです。
いきなりですが ロボシリンダと単軸ロボットの違いは明確に理解しておいたほうが良い と思います。というのも、単軸ロボットはロボシリンダに比べて高級品であり必要以上のスペックは勿体無いのと、この選択によって機械製造コストも大きく変わってくる場所だと思うんです。
細かく言うとロボシリンダの中にも安いものと高いものがあって・・・・(ここはまたいつか記事にします)
今日はその違いを簡単にメモしておきますので、設計初心者の方は是非選定の参考にしてみてください。
ロボシリンダと単軸ロボットの違い
結論
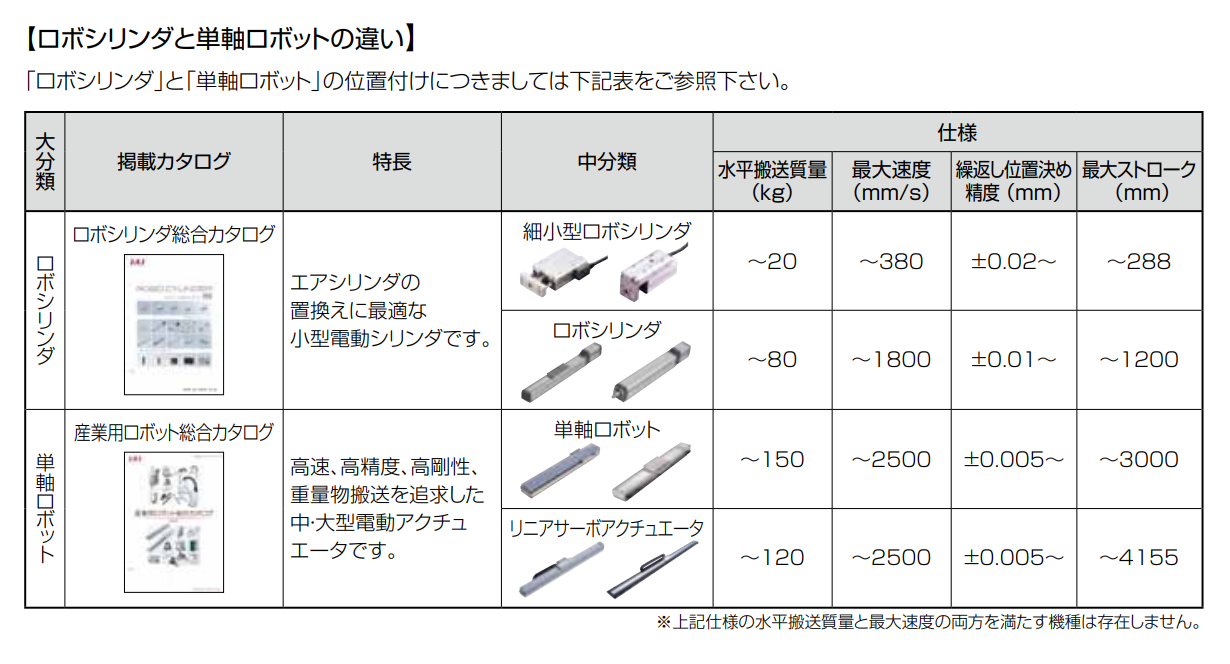
ロボシリンダと単軸ロボットの違いについてはIAIさんが説明をしてくれています。
引用:ロボシリンダと単軸ロボットの違い(IAIロボシリンダ総合カタログより)
ロボシリンダも単軸ロボットも、ボールネジ、リニアガイド、ACサーボモータを搭載した高精度電動アクチュエータですが、ロボシリンダ は小型化と軽量物の搬送に特化することで、単軸ロボットに比べて大幅な低価格化を実現しました。
と言う事ですが、もう少し具体的に違いを分けると
- ロボシリンダ:小型で最高速は単軸ロボットより低い
- 単軸ロボット:中~大型で最高速はロボシリンダより高い
という分け方になります。 では、どういった場所で使われるかというと
- ロボシリンダ:従来のエアシリンダの置換えなど
- 単軸ロボット:重量物の搬送で高速・高精度・高剛性が求められる場所
となります。
数値的な所ですと、以下のようになります。(IAIカタログ:「ロボシリンダ」と「単軸ロボット」の位置付けより抜粋)
ここの選定を適切に行えるかが、装置を適切価格で設計できるかという大きなポイントになってきます。
つまり、ロボシリンダと単軸ロボットの使い分けは必要な品質によって使い分けるんです。カタログ内の能力グラフ範囲内だったら何を使ってもOKというわけではありません。
そもそも名前がシリンダーとロボットなのは、開発された目的の違いがあったようですね。 エアシリンダの代わりだからロボシリンダで、プログラム動作できるロボットなので単軸ロボットだったようです。(なるほど・・・・。)
最後に
ロボシリンダ・単軸ロボットの選定は個人的に難しいと思っています。(ですよね?)その理由は大きく4つあって
- 搬送物の重量で大きく必要能力が変わる
- 搬送(動作)速度で必要能力が変わる
- 各ロボットの種類が多くてどこから探せば良いかわからない
- どちらも出来る動作が似ている
この部分で私たち設計者が上手に選定を行うためには
- 搬送物(ワーク)の特性をよく理解する事
- 設計する機械の仕様(駆動条件)を良く理解する事
- 必要寿命を把握する事
この3つがとても重要だと思うんです。
設計で「大は小を兼ねる」部分は多々あって、実際は大きい型番を利用していれば駆動的に問題がない場合も多いですが、個人的には過剰なスペックは削りたい派なので、適切な電動アクチュエータを使いたいんですよね。
基本的には
ロボシリンダで該当品がないか探す → 無かったら単軸ロボットで探す という流れですね。(技術の森でもそう書いてありました)
カタログを見て使用範囲内だから大丈夫 という選定よりも、
- こうなったらこのロボシリンダは使えない
- ここまでは許容できるから予定タクトよりも縮められる
などといった、内容を考え・狙って選定していきたいですし、若手の設計者にはしていってもらいたいですね。
以上です。