今日は 「イナーシャ(慣性モーメント)」 についてのメモです。
この記事は、イナーシャとは何か。イナーシャの計算方法など出来る限り解りやすくご説明いたします。
イナーシャ(慣性モーメント)とは?
イナーシャとは 物体がその時の状態を維持しようとする大きさを示す物理量 で 回転のし難さを表わし、イナーシャの値が大きいほど、加減速時に大きなエネルギーが必要になります。
逆に言うと、 自動車のエンジンなどに利用されているフライホイールなどの回転体は、イナーシャを利用しエンジンのトルク変動による回転速度の変動を小さくしている のです。
イナーシャの単位(呼び方は2種類)
J=[×10^(-4)kg・m^2] もしくは GD2=[kgf・m^2]
JとGD2の関係
J=GD2÷4 (例:0.000241J=0.000964GD2÷4)
GD2=J×4 (例:0.000964GD2=0.000241J×4)
「J」と「GD2」を計算する場合、単位に注意してください。
「kg・m^2」と[kgf・m^2] 及び 「kg・cm^2」と[kgf・cm^2]
モーターの選定は最大トルク・定格トルク・最高回転数を目安に行う
使用最大トルク≦モーター最大トルク
平均トルク ≦モーター定格トルク になるように選定します。
サーボモータを選定するとき、負荷の慣性モーメントがサーボモータの慣性モーメントの推奨倍以下になるようにする必要があります。 ACモーターの場合、ギヤヘッドの許容慣性モーメントが装置の慣性モーメント(=負荷慣性モーメント)を上回るように選ばないといけません。
ステッピングモーターは、モーターのローター慣性モーメントに対する負荷慣性モーメントの比を、 「イナーシャ比=負荷慣性モーメント÷ローター慣性モーメント」で求め、イナーシャ比が10倍以下になるようモーターを選ぶようにします。(中には30倍以下の物もある)
イナーシャが10倍になっても角加速度を1/10にすればトルクは変わらない。
イナーシャはあくまでトルク算出の1条件です。 モーターの選定において、イナーシャに関係するのは、加速・減速時の検討となります。
回転速度が変化するとき(加速・減速時)に必要なトルクはイナーシャの大きさによって決まります。 加減速時の必要トルクはイナーシャの大きさに比例し、大きな負荷の機械(高負荷イナーシャの機械)の場合はモータ容量が大きくなります。
また、イナーシャが10倍になっても角加速度(rad/s2)を1/10にすればトルクは変わりません。
イナーシャ比を考慮する理由
加減速トルクに余裕があっても、イナーシャ比が大き過ぎると、加速指令についていけず脱調することがある ため、 許容慣性モーメント(適用負荷慣性モーメント)を越えていると、きちんと制御できず動作が不安定になったり、アラーム出力して止まってしまうことがあります。
負荷慣性モーメントの大きいものでも、ギヤヘッドで減速すれば、小型のモーターでも「許容慣性モーメント×減速比^2」で減速比の2乗だけ大きなものが駆動できるようになります。
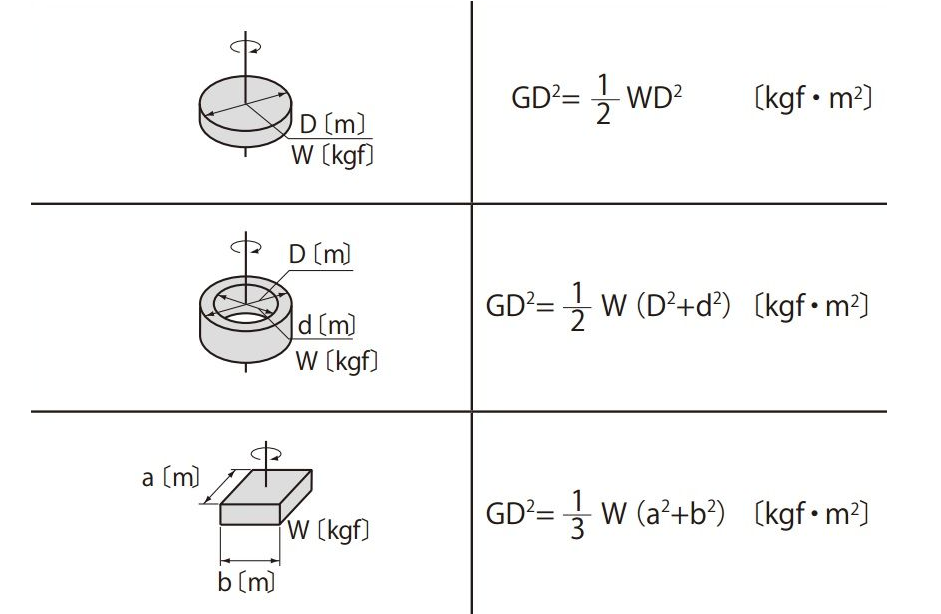
イナーシャを用いた基本計算式
一定回転におけるトルクを求める計算式
トルクT[N・m]=慣性モーメントJ[kgf・m^2]×回転時の角速度 ω[rad/s]
回転角速度を求める計算式
1[rad/s]=(1÷6.2832)÷(1÷60)=約9.55[rpm]
よって・・・
1000rpm/9.55=104.7[rad/s]
1500rpm/9.55=157.1[rad/s]
2000rpm/9.55=209.4[rad/s]
3000rpm/9.55=314.1[rad/s] となる。
ある回転まで加速するときのトルクを求める計算式
トルクT[N・m]=慣性モーメントJ[kg・m^2]×角加速度α[rad/sec2]
もしくは次の式でも求めることが出来ます。
トルクT[N・m]=(慣性モーメントJ[kg・m^2]÷9.55)×(回転速度差[rpm]÷加速時間[s])
必要トルクの計算式
トルク[N・m]=(負荷トルク[N・m]+加速トルク[N・m])×安全率
実効負荷トルクの計算式
ACサーボモーターとブラシレスモーターを選定するときにおいて、実効負荷トルクを計算する必要 があります。
特にモーターに要求されるトルクが時間とともに変化する場合、短いサイクル運転で加速減速が頻繁におこなわれるような運転の場合は重要になるので、これは各モーターメーカーサイトにて計算してください。
以上です。