今日は「ボールねじを使って上下昇降する時のモータートルク基本計算」のメモです。
モーターを直付け(減速機なし)での計算です。
前々回の記事では水平搬送におけるモーター必要トルクの計算をしました。今回は、上下昇降におけるモーター必要トルクの計算に特化しメモいたします。どうぞご利用ください。
- ボールねじを使って上下昇降する時のモータートルク基本計算
- モーターのトルク計算をするのに必要な項目
- ボールねじの必要回転数
- モーターの必要回転数
- サーボモータのエンコーダとドライバに必要な分解能
- 角速度
- 角加速度
- 加速度
- 上昇加速時の軸方向荷重
- 上昇等速時の軸方向荷重
- 上昇減速時の軸方向荷重
- 下降加速時の軸方向荷重
- 下降等速時の軸方向荷重
- 下降減速時の軸方向荷重
- 上昇等速時のサーボモーターに必要なトルク
- 下降等速時のサーボモーターに必要なトルク
- 全体の慣性モーメント
- 加速に必要なトルク
- 上昇加速時のサーボモーターに必要なトルク ※特にチェックする項目
- 上昇減速時のサーボモーターに必要なトルク
- 下降加速時のサーボモーターに必要なトルク
- 下降減速時のサーボモーターに必要なトルク ※特にチェックする項目
- 停止時のサーボモーターに必要なトルク(テーブル+ワーク) ※特にチェックする項目
- 1サイクル実効トルク簡易計算 (加速→等速→減速→加速→等速→減速→停止) ※特にチェックする項目
- 計算エクセルシートの参考
- モーターのトルク計算をするのに必要な項目
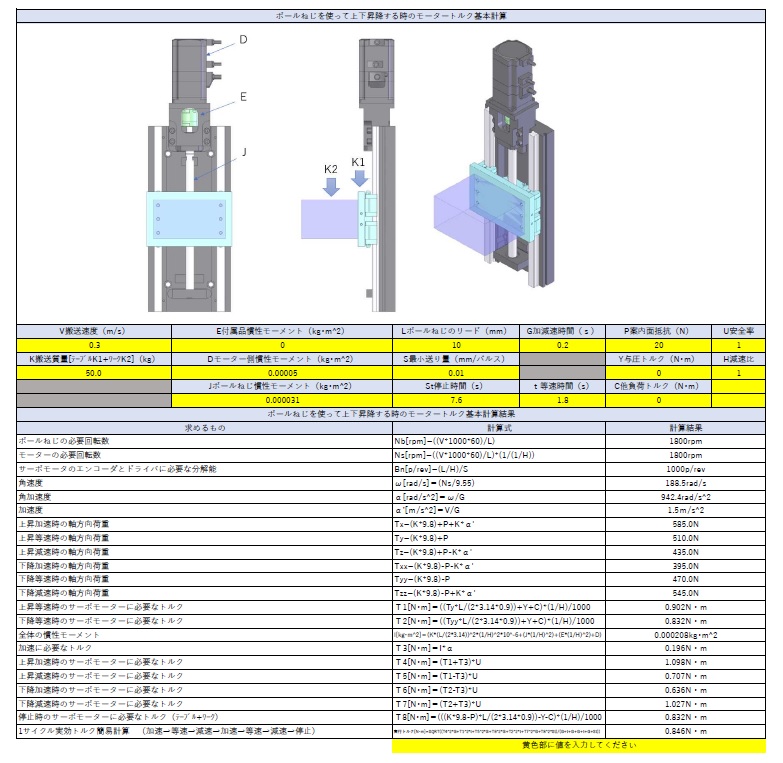
ボールねじを使って上下昇降する時のモータートルク基本計算
モーターのトルク計算をするのに必要な項目
ボールねじを使って上下昇降する時のモータートルクを計算するには以下の項目が必要になります。ボールねじ昇降のモーターのトルク計算においては、慣性モーメントも重要ですが上下の加速や減速には搬送物の質量が非常に重要になってきますので、設計の検討段階においても搬送物質量はできるだけ適切に把握したほうが良いです。
- V搬送速度(m/s)
- K搬送質量[テーブル+ワーク](kg)
- Jボールねじ慣性モーメント(kg・m^2)※カタログなど
- E付属品慣性モーメント(kg・m^2)※カップリングなど
- Dモーター側慣性モーメント(kg・m^2)※カタログなど
- Lボールねじのリード(mm)
- G加減速時間(s)
- t等速時間(s)
- St停止時間(s)
- S最小送り量(mm/パルス)
- Y与圧トルク(N・m) ⇒別記事:ボールねじ与圧トルクの計算式
- C他負荷トルク(N・m)
- H減速比
- P案内面抵抗(N)
- U安全率
ボールねじの必要回転数
ボールねじの必要回転数は以下の計算式で求めます。
Nb[rpm]=((V*1000*60)/L)
モーターの必要回転数
モーターの必要回転数は以下の計算式で求めます。
Ns[rpm]=((V*1000*60)/L)*(1/(1/H))
サーボモータのエンコーダとドライバに必要な分解能
サーボモータのエンコーダとドライバに必要な分解能は以下の計算式で求めます。
Bn[p/rev]=(L/H)/S
角速度
ω[rad/s]=(Ns/9.55)
角加速度
α[rad/s^2]=ω/G
加速度
α’[m/s^2]=V/G
上昇加速時の軸方向荷重
ボールねじを上下昇降する際、軸方向への荷重は運転パターンのどの行程かで軸に掛かっている軸方向の荷重が違います。上昇加速時の軸方向荷重は以下の計算式で求めることができます。上昇加速時はボールねじに大きな荷重が掛かっていることが分かります。
Tx=(K*9.8)+P+K*α'
上昇等速時の軸方向荷重
Ty=(K*9.8)+P
上昇減速時の軸方向荷重
Tz=(K*9.8)+P-K*α'
下降加速時の軸方向荷重
Txx=(K*9.8)-P-K*α'
下降等速時の軸方向荷重
Tyy=(K*9.8)-P
下降減速時の軸方向荷重
下降減速時の軸方向荷重は以下の計算式で求めることができます。ここで分かりますが下降減速時も大きな荷重が掛かりことが分かります。
Tzz=(K*9.8)-P+K*α'
上昇等速時のサーボモーターに必要なトルク
T1[N・m]=((Ty*L/(2*3.14*0.9))+Y+C)*(1/H)/1000
下降等速時のサーボモーターに必要なトルク
T2[N・m]=((Tyy*L/(2*3.14*0.9))+Y+C)*(1/H)/1000
全体の慣性モーメント
I[kg・m^2]=(K*(L/(2*3.14))^2*(1/H)^2*10^-6+(J*(1/H)^2)+(E*(1/H)^2)+D)
加速に必要なトルク
T3[N・m]=I*α
上昇加速時のサーボモーターに必要なトルク ※特にチェックする項目
上昇加速時のサーボモーターに必要なトルクは以下の計算式で求めることができます。上昇加速時がサーボモーターに最大の負荷が掛かります。この必要トルクを「瞬間最大トルク」が上回るように選定する必要があります。
T4[N・m]=(T1+T3)*U
上昇減速時のサーボモーターに必要なトルク
T5[N・m]=(T1-T3)*U
下降加速時のサーボモーターに必要なトルク
T6[N・m]=(T2-T3)*U
下降減速時のサーボモーターに必要なトルク ※特にチェックする項目
T7[N・m]=(T2+T3)*U
停止時のサーボモーターに必要なトルク(テーブル+ワーク) ※特にチェックする項目
停止時のサーボモーターに必要なトルクは以下の計算で求めることができます。ここで求めるトルクは、上下昇降する際に使うブレーキ付きサーボモーターの必要トルクとなります。
T8[N・m]=(((K*9.8-P)*L/(2*3.14*0.9))-Y-C)*(1/H)/1000
1サイクル実効トルク簡易計算 (加速→等速→減速→加速→等速→減速→停止) ※特にチェックする項目
実行トルクは以下の計算式で求めることができます。検討しているサーボモーターの定格トルクはこの実行トルクより上回っていなければなりません。
実行トルク[N・m]=SQRT((T4^2*G+T1^2*t+T5^2*G+T6^2*G+T2^2*t+T7^2*G+T8^2*St)/(G+t+G+G+t+G+St))
計算エクセルシートの参考
このような計算シートを作ると設計時間の短縮になります。
エクセルファイルについて
上記の計算エクセルですが、無料期間中多くの方に利用して頂きありがとうございました。 2024年より、このファイルは BASEにてダウンロード販売 となりました。 必要な方はご購入後ご利用ください。
以上です。